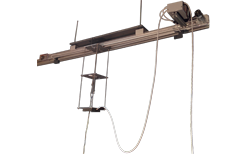
Fine behaviors of a connected animal are very tricky to measure, mainly because we have to make sure that the external systems do not influence the animal. Mechanical constraints due to the cables, fibers or tubes, often influence the locomotor activity of the animals. We developed a locomotion assistant that allows the animal to move freely in an open environment.
According to your equipment and your experiment room, we propose two options: